Algorithm for reconstruction of a discrete space curve
The algorithm given in the CMU’s discrete differential geometry course Lecture 11 only illustrates the basic concept of the workflow for reconstruction of a discrete space curve, which cannot be directly used. Therefore, I recapitulate the algorithm here.
Assume there are \(M\) vertices \(\left\{ v_0, \cdots, v_{M-1} \right\}\). Then there are \(M-1\) piecewise linear edges \(\left\{ e_0, \cdots, e_{M-2} \right\}\) with the edge length \(\left\{ l_{01}, \cdots, l_{M-2,M-1} \right\}\). The corresponding tangent vectors along the edges are \(\left\{ T_{01},\cdots,T_{M-2,M-1} \right\}\).
Curvature \(\kappa_i\) is defined as the angle variation of the two consecutive edges \(e_{i-1}\) and \(e_{i}\) sharing the \(i\)-th vertex. Hence there are no curvatures defined at the starting and ending vertices. The array of curvatures are \(\left\{ \kappa_1, \cdots, \kappa_{M-2} \right\}\).
The two consecutive edges \(e_{i-1}\) and \(e_i\) are coplanar. The normal vector of the corresponding plane is the binormal vector \(B_i\). There are \(M-2\) number of such binormal vectors \(\left\{ B_1,\cdots,B_{M-2} \right\}\), which can be considered as associated with the interior vertices.
For two consecutive binormal vectors \(B_i\) and \(B_j\), their associated planes may not be parallel. Hence the angle change \(\tau_{ij}\) from \(B_i\) to \(B_j\) is not zero and this is just the torsion. The array of torsion is \(\left\{ \tau_{12}, \cdots, \tau_{M-3,M-2} \right\}\).
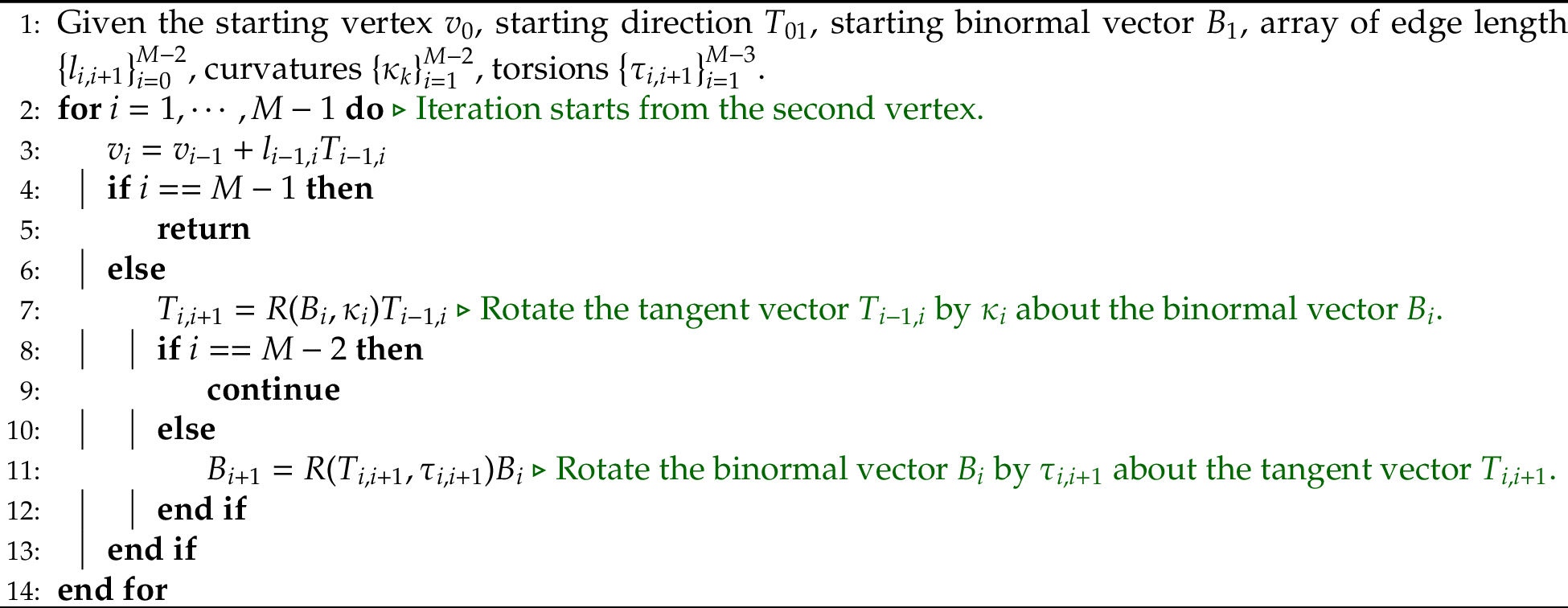
With the above definitions and array sizes clarified, the algorithm for reconstruction of a discrete space curve is given below.